

别只盯着眼睛看!这家机器人公司死磕“手感” 要重新定义实体AI

在当前AI领域一片“视觉”和“对话”的狂热中,一家来自斯坦福的具身智能独角兽——非夕科技(Fuxi),却选择了看似“非主流”的赛道:力觉优先。CEO王世全直言,对人类操作而言,大部分动作依赖对物体接触关系和实时力度的控制,而非时刻盯着目标。非夕十年磨一剑,将精力投入到自研机械臂本体的力控能力上,并推出了Enlight全感知机械臂和MICO双臂平台。
具身智能的难点在于“真实世界的稳定操作”,而力觉正是实现这一目标的核心。当前AI Agent的爆发,正需要一个能稳定执行物理指令的载体。非夕的“力控优先”路线,实际上是为下一代AI执行系统提前构建了最可靠的“物理基础层”,这一点比单纯的模型性能迭代更为关键。

为什么说“手感”比“看”更重要
非夕科技的坚持,是对具身智能核心挑战的深刻洞察。如果AI Agent(如MiMo-V2-Omni)可以完美规划出数字世界的任务,那么物理Agent就需要完美执行物理世界的任务。
王世全的解释非常到位:人类在完成精细操作时,眼睛更多是“瞟一眼”确认目标位置,随后动作的顺畅度和准确性完全依赖于手的实时力反馈和对接触物的感知。
- 如果机器人无法感知到工具与物体的微小接触变化,它就无法在不确定的环境中稳定工作。
- 这种力觉能力是实现高柔性人机协同、复杂装配、以及狭小空间作业的先决条件。

▲图源:量子位
市场验证:独特定位吸引头部客户,非夕的“非主流”路线并非空穴来风,其市场认可度极高,这为我们提供了技术路线有效性的证明。
- 6家全球排名前十的科技公司正在使用其机械臂进行具身智能研发。
- Generalist AI、Rhoda AI等超10家具身独角兽企业都是非夕的客户。
- 数十家全球前500强企业已在实际制造场景中采用其自适应机器人方案。
客户的结构决定了技术的价值导向。这些客户——AI研发公司、高端制造企业——他们需要的恰恰是应对非结构化环境的稳定性和灵巧性,而不是传统工业机器人那种重复、刚性的动作。力控的提升,意味着AI Agent在物理世界中的“执行可靠性”获得了保障。

新一代本体
轻量化下的全身感知网络,Enlight初昕系列机械臂,代表了非夕在自适应机器人本体工程上的最新成就,它在保持自适应特性的同时,实现了结构上的突破。
全身内嵌感知,告别外部皮肤,Enlight最引人注目的特点是其“全身感知”网络。与行业流行的外部贴电子皮肤不同,Enlight的每个关节都内嵌了多维力传感器。
- 这种设计避免了外部传感器易磨损、易受环境影响的缺点,实现了对接触力度、受力分布和细微形变的实时精准捕捉。
- 整臂分布有25万个触摸点位,触控力感知精度可达0.5N,位置分辨精度达2mm。
▲图源:量子位
轻量化与高负载的悖论解决,在保证结构刚度的同时,Enlight的自重被极大减轻,但负载能力却提升到了5公斤的实用水平,自重负载比相较前代提升了67%。
- 这得益于团队对机械结构极致的压缩和优化,将传动系统和安全硬件压缩到更小的关节空间内。
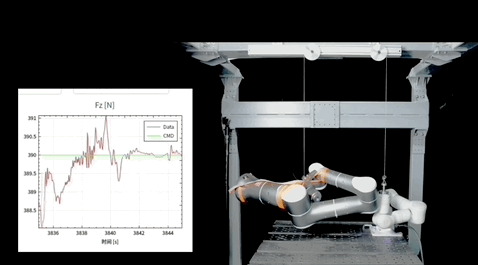
- 关节控制频率高达10kHz,整臂控制频率达2kHz,这种高速响应能力是实现打磨、装配等高精度工艺的关键。

▲图源:量子位
仿生工具的补全:壁虎夹爪
为了弥补末端执行器的短板,Enlight搭配了采用仿生壁虎材料的增强型夹爪。
- 这种材料基于干性吸附原理,能实现“粘且不黏”的效果,既能稳定吸附光滑或柔软物体,又不会留下残胶。
- 配合“刚柔双模式”切换,机器人能灵活应对从抓取重型工业件到轻柔处理易碎品的各类任务。
▲图源:量子位
本质安全:主动防护而非被动停止,非夕强调的“本质安全”设计,已经升级为主动防护。机械臂不仅在检测到异常阻力时会停止,更能以毫秒级速度自主反应,实现物理层面的主动安全保障。这依赖于其自研的安全硬件机制和覆盖条件反射的小脑层系统。

双臂协同与生态构建
MICO平台:解耦复杂性,打造通用基座,在Enlight机械臂之上,非夕推出了MICO双臂一体化仿人智能机器人平台,其核心支撑是自研的Orion控制器,旨在解决双臂协同的同步性和耦合性难题。
原生双臂设计:解决传统痛点,MICO并非简单的双臂拼凑,而是从底层就为双臂协同作业展开设计,这能大幅减少对非标辅助设备的需求,提高设备复用率。
- Orion控制器能够通过一个控制箱同时驱动两台Enlight机械臂,从根源上解决了传统双臂控制中同步性差、力控耦合的难题。
- 图形化编程界面,让开发者无需深入研究复杂的14个自由度协同轨迹规划,即可轻松实现复杂操作。

▲图源:量子位
模块化哲学:从硬件到软件的解耦,非夕的战略核心是将系统解耦,构建一个通用机器人基座平台。
- 硬件层面,从Enlight到MICO,通过标准化接口和腰部/视觉模块的选配,实现一套平台适配多种场景(工业、医疗、服务)。
- 软件层面,将复杂的力控能力抽象为模块化的“元操作Primitives”,封装成标准功能块。这使得上层开发者只需关注任务逻辑和策略设计,无需处理底层力学反馈。

▲图源:量子位
这种模块化和解耦的思路,与当前AI领域对Agent的工程化要求高度一致(即MCP、Skills)。非夕在物理世界中实践了AI工程化所需的“标准接口”和“能力封装”。通用机器人基座一旦成熟,将大大降低具身智能应用的开发成本,让行业应用能够快速迭代,专注于特定场景的“内核叙事”。

▲图源:量子位

应对未来的挑战:从灵巧到通用
非夕的Enlight系列更侧重于灵巧敏捷的To B场景,而Rizon系列则深耕工业稳健性。这种矩阵互补,确保了其在机器人本体领域能够全面覆盖。王世全强调,通用机器人的终局是感知、控制与决策的深度耦合,而非单一的性能突破。我们的责任是利用AI技术,将那些看似“非主流”的力觉控制,转化为下一代机器人稳定、安全执行任务的基础能力。(微信公众号:Tahou_2025)
关注塔猴公众号,回复“1”加入专属社群
扫码下载塔猴APP,查看更多干货

