

一句话生成无限逼真3D场景!匹兹堡大学新作直击VLM空间推理软肋丨CVPR'26


VLM看图像描述头头是道,一遇到3D空间推理就“晕菜”。
物体一多、视角一换,认知底线直接被击穿。
更麻烦的是,想测也测不明白:真实数据集贵且没法调参数,程序生成的3D场景又假又反物理,业界一直缺一套多样化、可扩展且支持完全自定义的测试基准。
为了打破这一僵局,来自匹兹堡大学的研究团队提出了InfiniBench框架,并在最新论文中系统阐述了该方法的核心机制,该论文已被计算机视觉顶会CVPR2026接收。
该方法通过引入大模型智能体(LLM Agent)进行迭代优化,并结合创新的“基于簇的布局优化策略”,只需一句自然语言提示词,就能全自动生成理论上无限数量、且高度逼真的3D视频基准测试场景。不仅如此,它还能完全按照用户的意愿,精确控制场景的复杂度。
这项研究不仅为诊断大模型(如Gemini 2.5 Pro、GPT-5等)的空间推理失败模式提供了利器,也为未来VLM的空间感知能力训练指明了方向。
为何需要一个“无限”的基准生成器?
在真实世界的3D空间中,理解物体的摆放、朝向和相互关系,是人工智能走向通用化的关键。但现有评估VLM空间推理能力的数据集存在严重局限:
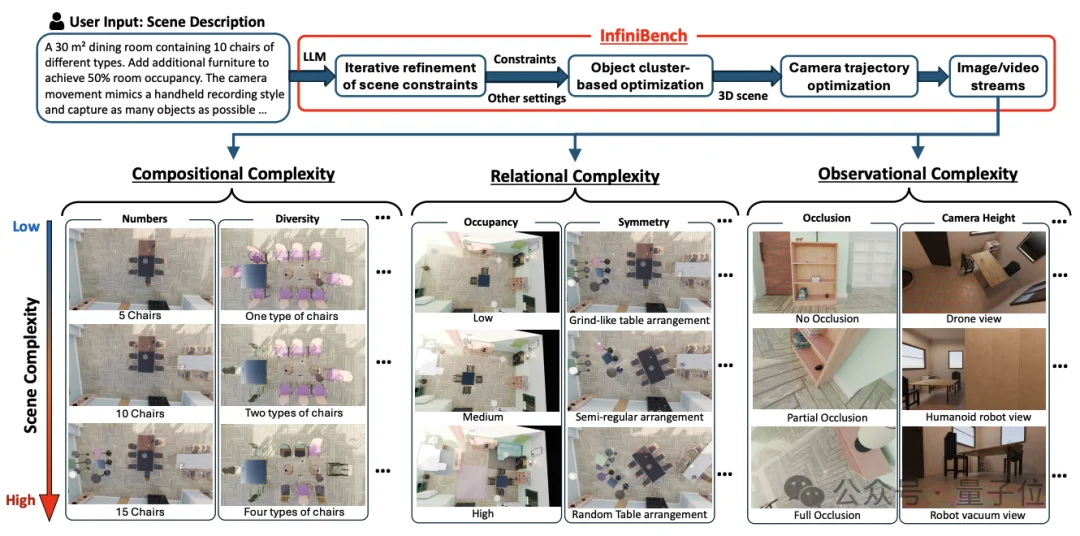
维度混淆,难以归因:现有测试往往只用简单的“房间数量”来定义复杂度,导致模型一旦回答错误,研究人员根本不知道是因为“无关干扰物体太多”(组合复杂度),还是“物体排列太诡异”(关系复杂度),亦或是“相机视角被严重遮挡”(观察复杂度)。
生成工具的“常识缺乏”:直接用LLM生成3D布局,当物体数量一多,经常会出现“物体穿模”、“悬空”或“超出房间边界”等违背物理常识的失误。而传统的3D程序化引擎虽然符合物理规律,但又很难听懂人类复杂的自然语言指令。
为了实现可定制、高度逼真且物理合理的3D场景生成,匹兹堡大学的研究人员提出了InfiniBench。
InfiniBench不生产固定且僵化的数据集,而是提供了一个全自动的基准生成引擎。你只需要告诉它:“生成一个30平米的餐厅,里面有10把不同类型的椅子,再加点家具让空间占用率达到50%”,它就能自动进行布局规划、物理校验,并最终渲染出一镜到底的视频。
技术方案:大模型智能体与聚类优化的完美结合
InfiniBench的整体管线分为三个核心阶段,彻底分离了“高层语义规划”与“底层物理执行”。
步骤1:大模型智能体迭代生成场景约束(Agentic Generation of Scene Constraints)
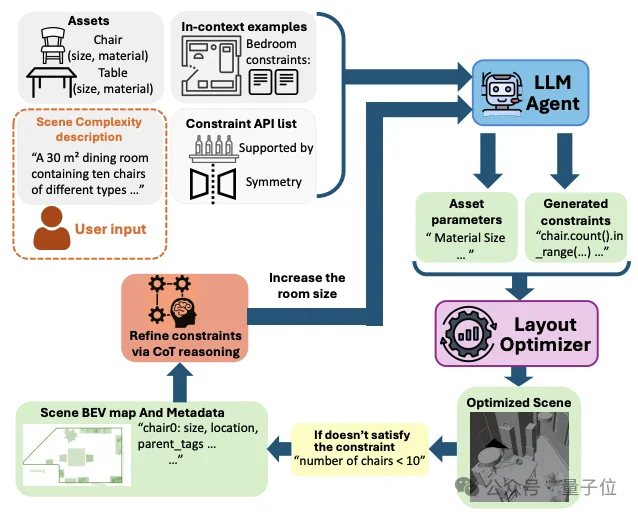
传统的程序化3D生成往往需要专家手动编写晦涩的代码脚本。InfiniBench通过引入LLM Agent打破了这一门槛。系统会提供给大模型一套包含可用程序API和少样本示例(Few-shot)的知识库。LLM负责将用户的自然语言需求,翻译成机器可读的约束条件。
亮点在于其“自我反思与修正”机制(CoT反馈循环):
如果生成的约束在物理上行不通(例如,LLM想把3个显示器放在一张普通尺寸的书桌上,显然放不下),底层的布局优化器就会报错,并返回一张带有碰撞信息的“鸟瞰图(BEV)”和错误摘要。LLM接收到反馈后,会启动思维链(CoT)推理,分析失败原因(例如桌面面积不足),从而自动修改约束(例如更换一张更大的书桌),直至生成合理的规划。
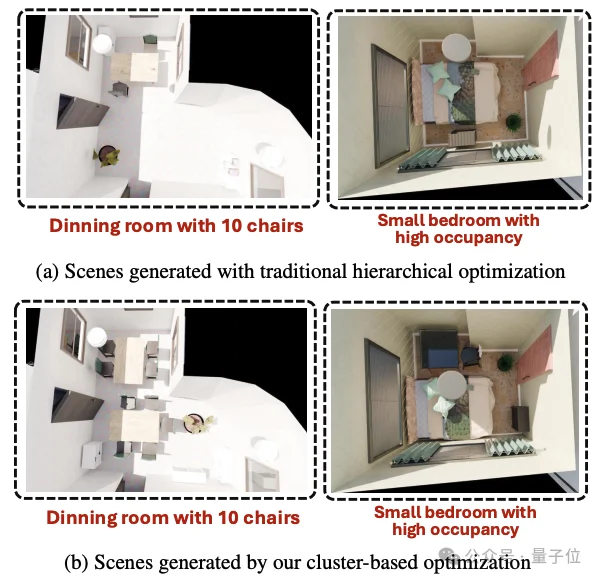
步骤2:突破高密度极限的“基于簇”布局优化(Cluster-based Layout Optimization)
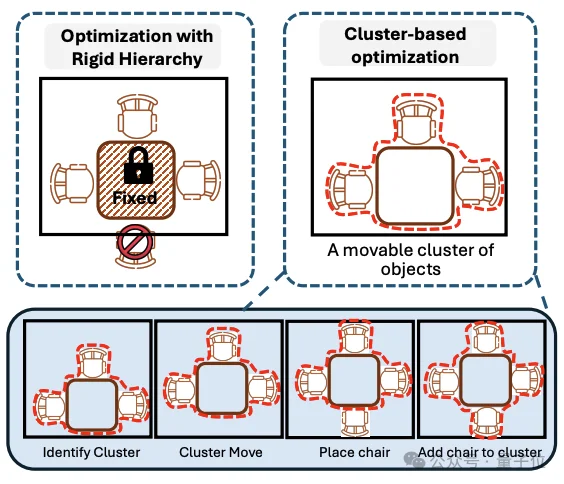
这是InfiniBench超越传统3D生成引擎的核心亮点。当场景复杂度(物体数量、空间占用率)急剧攀升时,传统的“层级优化策略(Hierarchical optimization)”往往会陷入死胡同——它们习惯先固定大物件(如桌子),结果发现剩下的小物件(如椅子)根本塞不进去了。
为了解决这个问题,研究团队创新性地引入了“可移动簇(Movable Cluster)”的概念:
1. 识别簇:系统自动解析场景的语义图,将关系紧密的物体(例如:一张餐桌和它周围的一圈椅子)打包成一个“大块头(父子对象群体)”。
2. 扩展动作空间:在布局优化时,允许整个“簇”在不破坏内部相对位置关系的前提下,作为一个整体移动到房间的更优位置。
3. 碰撞检测:使用整个簇的集体边界框进行物理碰撞检测。
这一极其灵活的策略,使得原本传统算法根本无法生成的“高密度、重度杂乱”场景变得轻而易举,且完全符合物理规律。
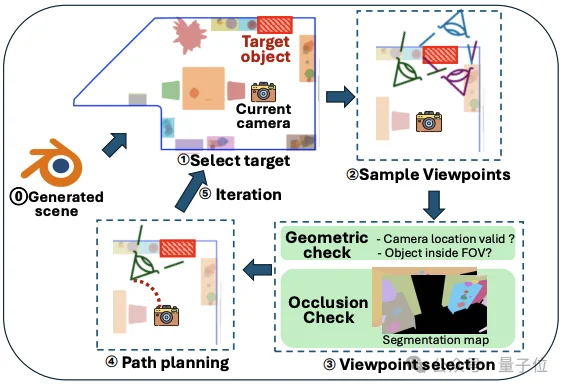
步骤3:任务感知的相机轨迹优化(Camera Trajectory Optimization)
有了3D场景,还需要为VLM提供完美的2D视频输入。一个糟糕的运镜可能会遮挡关键物体,导致VLM无法答题。
受机器人经典导航技术“基于前沿的探索(Frontier-based exploration)”的启发,InfiniBench开发了一套相机轨迹优化算法。
系统会将“未访问的关键物体”视为前沿目标,自动为每个物体采样无遮挡的最佳视角,并利用Dijkstra算法在2D平面图上规划出一条无碰撞的极简导航路径,确保所有与测试任务相关的物体都能被清晰、完整地捕捉在视频镜头中。
实验结果:物理真实度满分,精准定位大模型缺陷
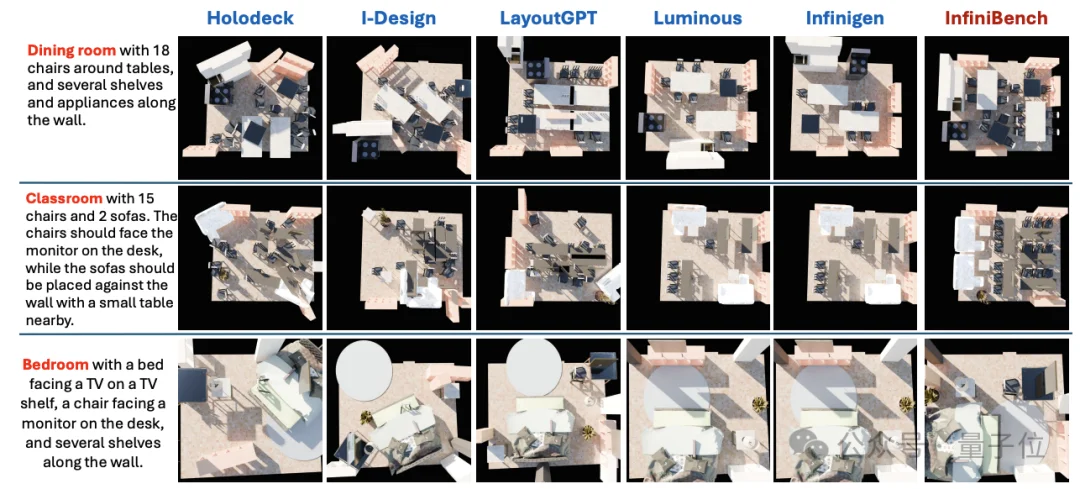
研究人员在多个配置(少/中/多 物体数量,低/中/高 空间占用率)下,将InfiniBench与现有的LLM驱动生成方法(如LayoutGPT、Holodeck)和程序化生成方法(如Infinigen、Luminous)进行了对比。随着场景变复杂,现有方法在“提示词保真度(Fidelity)”和“物理合理性(碰撞率/越界率)”之间往往顾此失彼。
而InfiniBench不仅提示词契合度比肩顶尖LLM方法,更在物理合理性上达到了近乎完美的水平(碰撞数量和越界物体数量均无限逼近于0.0)。

更令人兴奋的是,团队利用InfiniBench对目前最顶级的VLM(包括Gemini-2.5-Pro、GPT-5、LLaVA-Video-7B、InternVL3.5等)进行了空间推理的“极限施压”。
在涵盖测量、视角转换、时空追踪的多种任务测试中,实验揭示了几个极其重要的结论:
VLM对“视觉杂乱”极度敏感(组合复杂度):当场景中的物体数量从5增加到50时,所有VLM的准确率均出现断崖式下跌,且倾向于在视频帧中“重复计数”。
被“干扰项”带偏(关系复杂度):无关物体的增加会导致模型在复杂指代(如“那个靠近木桌的蓝色杯子”)时发生严重的指代混淆。
视角的降维打击(观察复杂度):对于需要宏观空间理解的任务(如透视变换、时空追踪),鸟瞰视角(BEV)下的模型表现远超第一人称的主观视角(Egocentric view),这一发现对未来具身智能机器人的视角设定具有重大指导意义。
项目价值与总结
总而言之,InfiniBench颠覆了传统静态评估基准的局限。它不仅是一个能通过一句话生成无限逼真3D场景的强大引擎,更是当前视觉语言大模型(VLM)的一面“照妖镜”。
通过精细化、参数化地控制场景中的成分、关系和观察复杂度,InfiniBench帮助研究人员跳出粗放的“平均准确率”指标,能够像手术刀一样精准地剖析大模型在空间推理中的具体失败模式。这项工作不仅大幅降低了3D场景生成的专业门槛,也为未来训练具备更强物理常识和空间感知能力的具身智能基座模型,提供了取之不尽的高质量数据源。
论文标题:InfiniBench: Infinite Benchmarking for Visual Spatial Reasoning with Customizable Scene Complexity论文地址:https://arxiv.org/pdf/2511.18200作者简介:本文由匹兹堡大学智能系统实验室(Intelligent Systems Laboratory)的研究团队完成。第一作者为匹兹堡大学的王淏明(Haoming Wang),共同作者包括Qiyao Xue和Wei Gao教授。
文章来自于"量子位",作者 "InfiniBench团队"。
